Uncertainty over time
We consider the Markov assumption: The current state $X_t$ depends on only a finite fixed number of previous states.
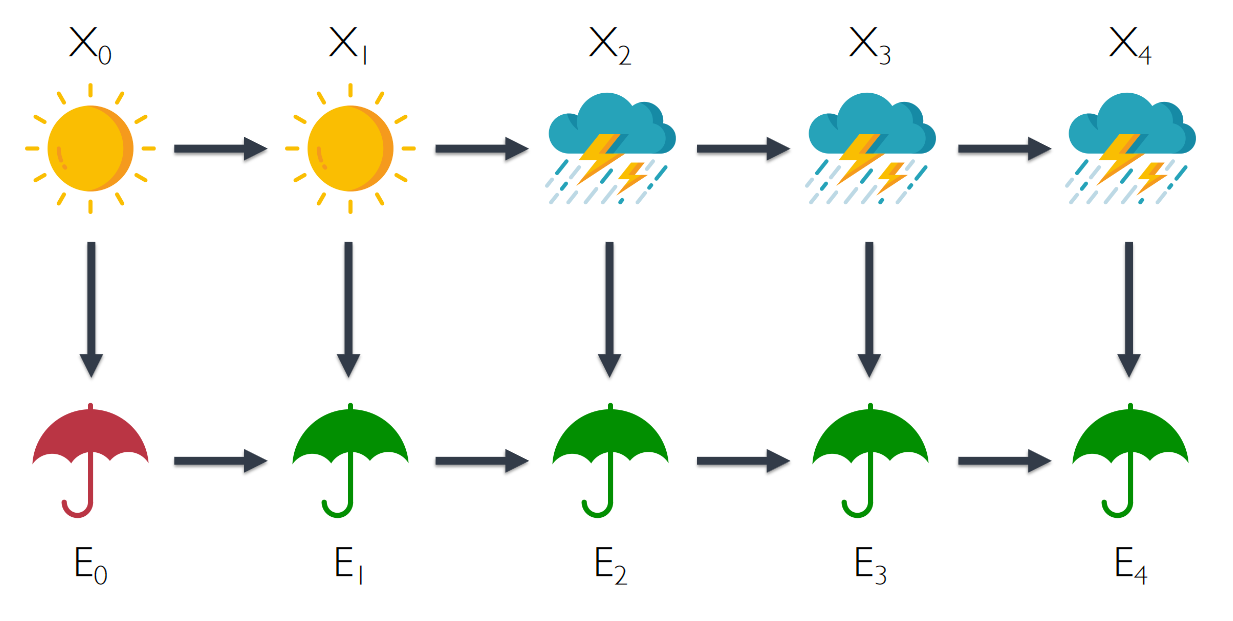
A Markov chain is a sequence of random variablesfor which the distribution of each variable follows the Markov assumption.
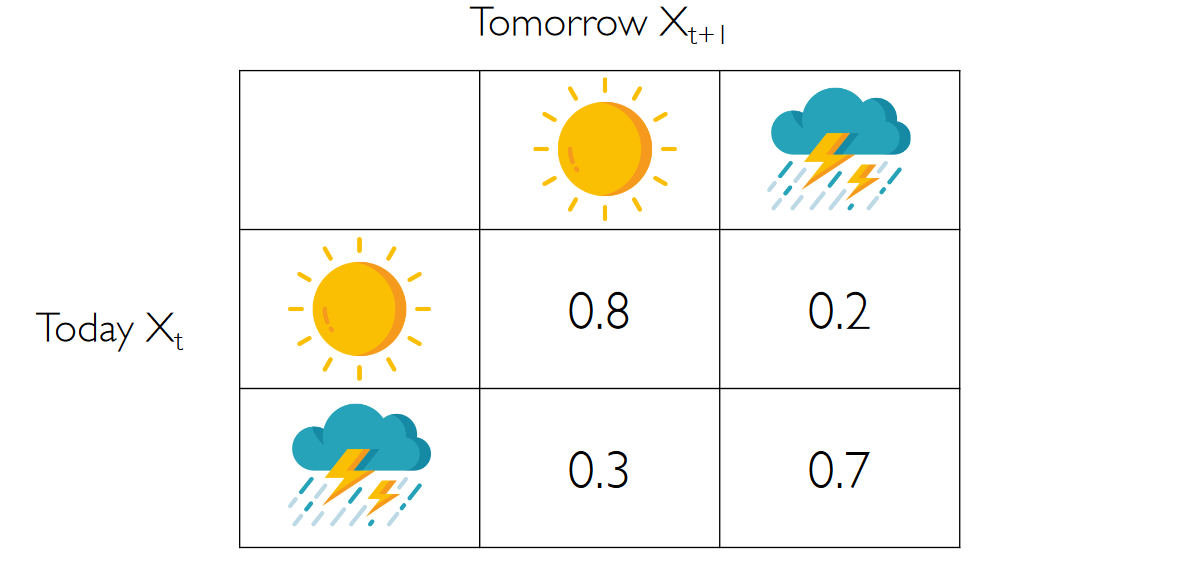
We can define a transition model, for example:
In many cases we have an hidden state which is not observable but we can observe some variables. For example:
- We want to know the robot position but we can observe only the sensors data
- We want to know the words spoken but we observe only the audio waveforms
- We want to know the weather outside but we can only see how many people have an umbrella
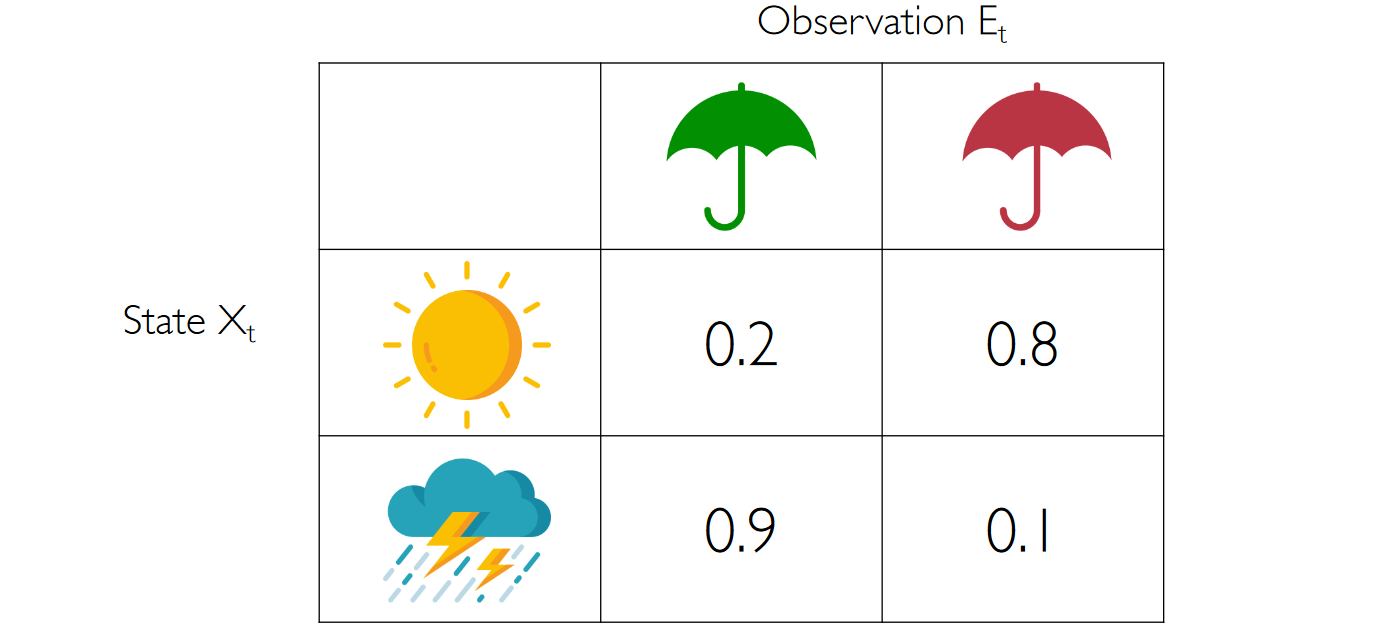
Sensor Markov assumption: the evidence variable depends only the corresponding state
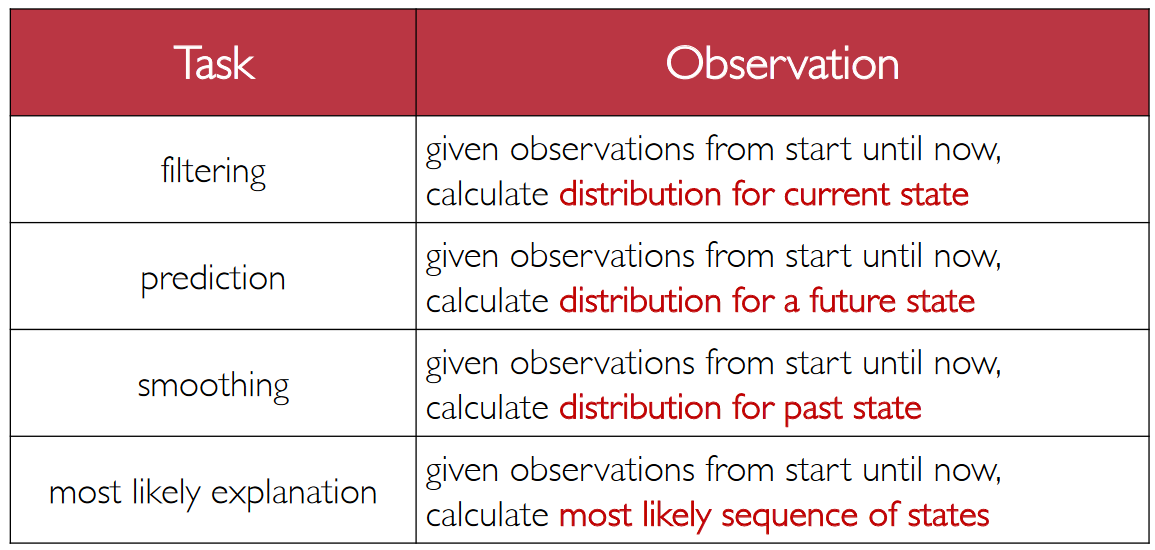
The possible tasks we could want to do in this context are:
No Comments